
一、自冲铆钉机传动方式及确定
通常,我们所使用的铆钉机,油压铆钉机,液压铆钉机使用的传动方式主要有:机械方式、电气方式、电子方式、液压方式、气动方式,这些传动方式有各自的特点如表3-1示。
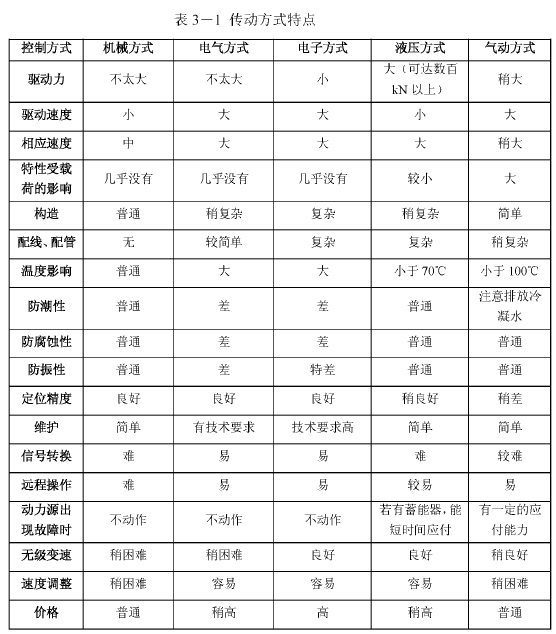
根据表3-1中各种传动方式的初步比较,自冲铆钉机的传动方式主要在液压传动和气压传动中选择。而液压传动相对于气压传动还有其特殊的优点:
1.液压传动装置的重量轻,体积紧凑。
2.可实现无级变速,调速范围大。
3.运动件的惯性小,能够频繁迅速换向;传动工作平稳;系统容易实现缓冲吸震,运行噪声小,并能自动防止过载。
4.与电气配合,容易实现动作和操作自动化;与微电子技术和计算机配合,能实现各种自动控制工作。
5.液压元件已基本上系列化、通用化和标准化,利于CAD技术的应用,提高工效,降低成本。
根据自冲铆钉机要求质量小、体积紧凑、传动平稳、压力稳定等工作要求,确定铆钉机选用液压传动系统。
二、自冲铆钉机的液压回路设计和工作原理

1、自冲铆钉机液压系统的拟定
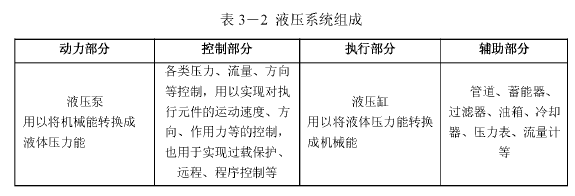
铆钉机工作包括压边、铆接、回位过程。根据实际生产中要求实现铆接力可控、铆接速度快、操作方便等要求。液压系统由三个功能部分和辅助装置组成如表3-2示。
自冲铆钉机液压系统的设计:
1).液压系统流量不大、压力要求不高,对平稳性要求也不高,从经济性和维护费用低等考虑采用低压齿轮泵供油。
2).液压系统采用单项顺序阀控制液压缸各腔的供油顺序。
3).液压系统快下时防止背压设置液控单项阀。
4).液压系统应用压力开关实现活塞的自动换向。
5).液压系统采用三位四通型中位机能的电磁阀实现换向。
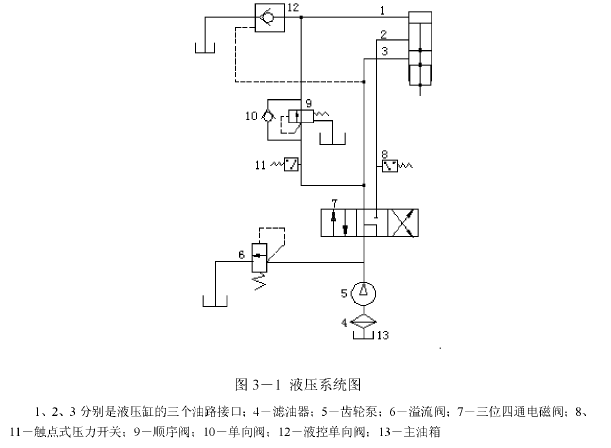
拟定的液压系统示意图如3-1示。
2、自冲铆钉机铆接过程的工作原理
铆接开始时,通过按开始按钮使三位四通电磁阀7处于左位工作状态,液压油被齿轮泵5经滤油器4从油箱13吸到油路中,经过三位四通电磁阀7分流,一部分流向铆接液压缸的油路接口3,而另一部分流向顺序阀9;通过调定顺序阀的开启压力,保证低压时液压油优先流入液压缸的油路接口3,从而推动压边圈先向下移动,同时拖动冲头同时向下移动;当压边圈达到下死点,将需要铆接的板料压紧,避免铆接板料过多地向凹模内流动。当压边圈压紧铆接板料后,随着齿轮泵的运转,系统内的压力升高到顺序阀调定的极限压力值时,顺序阀打开,液压油经过压力开关11进入油路接口1连接的缸内,推动冲头继续下移冲压铆钉使其刺入铆接板料,变形后的铆钉与板材之间形成可靠连接,铆接过程中油路接口2所连接的液压缸始终通过三位四通电磁阀7将液压油排回油箱,铆接过程结束。当液压系统的压力达到设定的铆接力后,系统内的压力升高到压力开关所预调定的压力时,压力开关11会给控制电路一个信号,从而使控制电路通断状态发生改变(电路部分将在后面章节详细介绍),使三位四通电磁阀7处于右位工作状态,液压油从齿轮泵5出来后,一部液压油分经过三位四通阀7右位推动液控单向阀12,使之处于通路状态,保证油口1所连接的油腔回油。另一部分液压油经过压力开关8进入油路接口2所连接的缸体内,先推动冲头向上回位,冲头回位到一定行程后拖动压边圈共同回位,此时的油路接口1、3所连接的液压缸均排油,油路接口1所流出的油分成部分,一部分经过液控单向阀12流回主油箱,另一部分经过单向阀10流至三位四通电磁阀7的右位回主油箱。油路接口3所连接的液压缸经过三位四通阀7的右位回主油箱,当冲头及压边圈达到上止点时,2路的油压升高,当达到压力开关8所预先调定的压力时,压力开关8会给控制电路一个信号,从而使控制电路通断状态发生改变,使三位四通电磁阀7处于中位状态,液压缸停止工作,通过按启动按钮控制三位四通电磁阀7使自冲铆钉机自动完成一次铆接循环。
3、自冲铆钉机的电路设计和工作原理
自冲铆钉机控制系统的电路设计主要根据已经设计好的液压系统设计,同时,满足铆钉机的以下功能:
1).点动控制按下开始按钮后自冲铆钉机自动实现铆接及回位整个循环。
2).工作过程中可随时手动控制停车。
电路部分的设计主要是通过按钮和压力开关控制液压回路中的三位四通电磁阀,使其处于不同的通路上,从而实现上述功能。
电路设计如图3-2示,其中:
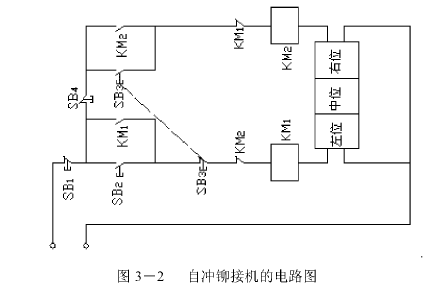
SB1一停止按纽,在电路中为常闭;
SB2一点动开始按纽,在电路中为常开;
SB3一压力复合开关;
SB4一压力开关,在电路中为常闭;
KM1一接触线圈;
KM2一接触线圈;
按下SB2,KM1线圈通电,左位通电,同时MK1常开触点吸合,即三位四通电磁阀左位被接通,使液压缸中的压边圈及冲头顺序向下移动,当冲头到达下死点后油路中压力升高,复合压力开关SB3左路中断开,从而使左位断电,同时在右位中的复合压力开关SB3由常开变为闭合,KM2线圈通电,右位通电,同时KM2常开触点吸合,即三位四通电磁阀右位被接通,使液压缸中的压边圈及冲头顺序向上移动,当冲头到达上死点后油路中压力升高,复合压力开关SB4断开,右位不通,此时在回位弹簧的作用下三位四通电磁阀处于中位,从而使冲头在到达上死点后自动停止,实现一个完整的工作循环,按下SB1可实现随时停车。KM1、MK2为常闭开关在电路中均起保护电路不要同时工作的作用,以左位中电路为例,当左位中的KM1线圈通电,同时在右位电路中的KM2常闭开关断开,保证了在左位通电时,右位不能通电。
 |
|
华东区客服 华南区客服 全国客服 |
 |
 |